所長紹介
創造的ロボット開発で
社会に貢献しよう!
3.11の大地震と津波で発生した福島第一原発(1F)の事故を終息させ廃炉を実現するには、今後長期間にわたって多くの廃炉用ロボットを開発し、現場に投入し続けることが必要です。この廃炉作業では多種多様な作業を遠隔操作型のロボットで実施することが絶対的に必要であり、廃炉に関わる作業者を被ばくから守るという人道的な観点からも、必ず人に代わってロボットが作業を遂行しなければなりません。つまりここは、ロボット開発者にとっては、世界中の誰も思いつかなかったような廃炉用ロボットを発想し開発する創造性と技術力を遺憾なく発揮し、活躍できる場であるとも言えます。白山工業(株)が東京電力のグループ会社であるため、HERO研はこの問題を主体的に取り込める立場にあり、この1F用廃炉ロボット開発を最も重要な開発項目としています。ただそれだけに拘らず、東京電力が抱えるインフラの点検・補修維持などを行うロボットや、それ以外にも社会に役立つ装置の開発を、研究員の自由な発想で進めていきます。創造的ロボット開発で社会に貢献したい人は是非コンタクトください。
極限環境ロボット研究所 [HERO Lab.]
所長 広瀬 茂男
略歴
- 東京工業大学にて、ロボット工学や機械工学の分野で数多くの先駆的な研究を行い、数々の新しいメカニズムの考案を通じてロボット工学の発展に貢献。また、教育においては、特に創造性育成科目の設立と実施に力を入れ、大学の枠を超えたものづくり教育の普及にも尽力。2013年に東京工業大学退職後は、東工大発ベンチャーの(株)ハイボットの社長・会長を務め、2020年からはインフラ点検用ロボットの開発や福島第一原発のための数々の廃炉用ロボットの開発を行う、極限環境ロボット研究所の所長に就任し、大学時代から一貫して主張してきた「役に立つロボット」の開発を続けている。
- 1947年東京都生まれ
- 1976年東京工業大学 制御工学専攻博士課程修了 機械物理学科助手 ロボット工学専門
- 1979年東京工業大学 機械物理工学科 助教授
- 1992年東京工業大学 機械物理工学科 教授
- 2011年東京工業大学 大学院理工学研究科 卓越教授
- 2013年東京工業大学 名誉教授
- 2020年白山工業株式会社 極限環境ロボット研究所 所長
- 2023年日本ロボット学会名誉顧問
主な受賞歴
- 1999年第1回IEEE Pioneer in Robotics and Automation Award
- 2006年紫綬褒章
- 2009年The Joseph Engelberger Robotics Award
- 2013年日本機械学会技術功労賞
- 2017年IEEE Inaba Technical Award for Innovation Leading to Production
- 2021年瑞宝中綬章
- ※総計81件の学術業績関連の賞を受賞
※著書や論文などを対象として受賞した個別の学術賞は以降に主な著書に記載
主な著書
- ■「自然とロボット 2 ヘビ」桐原書店 1985年4月発行
- ■「生物機械工学」工業調査会 1987年8月発行
1988年11月日刊工業新聞 技術・科学図書文化賞 最優秀賞 - ■「ロボット工学」裳華房 1987年12月発行
1989年3月手島記念研究賞 著述賞
1989年7月計測自動制御学会賞 著述賞 - ■「Biologically Inspired Robots」Oxford Univ Pr 1993年6月発行
1994年5月手島記念研究賞 著述賞 - ■「ロボット創造学入門」岩波ジュニア新書 2011年6月発行
ロボットの開発実績
所長がこれまで手掛けてきた研究開発分野をご紹介します。
-

Chapter 01
もっと見る
ヘビの生物力学的研究とヘビ型ロボット -
生き物であるヘビ(シマヘビ)を対象とし、その推進力学を数理解析と動物実験によって究明した研究は、同氏が1971年東工大修士課程入学した時から始まり1976年の博士論文にその成果をまとめている。このような実際のヘビを対象とした生物力学的なヘビ型ロボットの研究は世界的にも前例のない先駆的な研究であり、世界の生物力学的研究の規範となっている。そしてこれに匹敵する研究は半世紀たった今でも世界的にも行われておらず、その研究成果は未だにまったく色褪せていない。
同氏は1972年に世界で初めて実際のヘビと同じ原理でほふく推進するヘビ型ロボットの開発に成功して以降、狭隘環境の探査用に発展させた節体幹型移動ロボット、レスキュー用として発展させたロボット、体幹に触覚系を取り付けてその触覚信号の処理系として側抑制型運動制御系導入したロボット、3次元的な運動性能を有し水陸両用の運動性能を有するロボット、などと広範な発展研究を展開し世界のヘビ型ロボット開発研究を牽引してきた。当時、同氏が最初のヘビ型ロボットの制御の際に名付けたヘビの体形曲線であるサーペノイド曲線は、今ではヘビ型ロボットの基本曲線として世界中の研究者が使用するようになっている。このテーマに関する主な受賞
- ① 梅谷陽二、広瀬茂男:ほふく(匍匐)運動の生物力学的研究 -定常直進滑走時の体形曲線-, 計測自動制御学会論文集, 10, 4, pp.513-518 (1974)(計測自動制御学会 論文賞 1976.8.26)
- ② 広瀬茂男、織田春太、梅谷陽二:斜旋回機構を用いた索状能動体とその制御, 計測自動制御学会論文集, 17, 6, pp.686-692 (1981) (計測自動制御学会 論文賞 1983.7.28)
- ③ 広瀬茂男、森島昭男、塚越真一、妻木俊道、物部宏之:節体幹型ロボットKR IIの開発, 日本ロボット学会誌, 9, 5, pp.551-559 (1991) (日本ロボット学会 技術賞 1992.11.1)
- ④ 広瀬茂男、三井健雄 ; Whole Stem Drive型配管内移動機構の提案, ロボティックス・メカトロニクス講演会’93講演論文集,pp.699-702 (1993) (日本機械学会ロボティクス・メカトロニクス部門 ロボティクス・メカトロニクス講演会ベストポスター賞 1993.7.7)
- ⑤ 高山俊男、広瀬茂男:螺旋回転推進を行う三次元索状能動体の研究、日本ロボット学会誌、22、5、pp.625-635 (2004)(日本ロボット学会 論文賞 2006.9.15)
- ⑥ Shigeo Hirose: BEST PAPER award, IEEE International Workshop on SSRR2006, August 22-24, 2006 NIST, Gaithersburg, Maryland USA, Masayuki ARAI, Yoshinori Tanaka, Shigeo Hirose, Shingo Tsukui,Hiroyuki Kuwahara :“Improved Driving Mechanism for Connected Crawler Vehicle “Souryu-IV” for In-Rubble Searching”
- ⑦ 広瀬茂男(受賞者)広瀬茂男(デザイナー):水陸両用ヘビ型ロボットACM-R5、2006年グッドデザイン賞 新領域デザイン部門、2006年10月25日
- ⑧ 広瀬茂男:東工大工系創成的研究賞(Tokyo Tech Innovative Research Engineering Award) 「多輪ヘビ型瓦礫内探査ロボット蒼龍7号機の開発」(2008/9/17)
また、同氏の博士論文とその後のヘビ型ロボットの研究をまとめた著書である「生物機械工学」(工業調査会)とその英訳版である“Biologically Inspired Robots (Snake-like Locomotor and Manipulator)”(Oxford University Press)はヘビ型ロボット研究のバイブルとなっており、それぞれ以下の賞を受賞している。
- ① 広瀬茂男 : 生物機械工学, 工業調査会, pp. (1987)(日刊工業新聞 第4回技術・科学図書文化賞 (最優秀賞) 1988.11.10)
- ② Shigeo Hirose: Biologically Inspired Robots (Snake-like Locomotor and Manipulator), Oxford University Press, pp. (1993) (財団法人 手島工業教育資金団 手島記念著述賞 1994.5.24)
-

Chapter 02
もっと見る
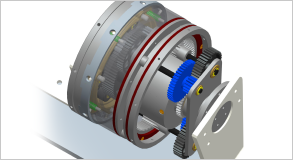
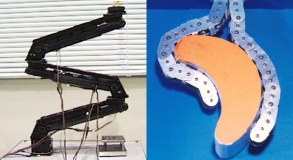
ヘビ型多関節アーム -
ヘビのような細長く自在に屈曲可能なヘビ型アームに関しての研究も同氏は体系的な研究を行っており、考えられるほぼすべての形態のアーム形状を試作し、その一部は実用化されている。そのうちの一つである、少ない数の駆動系で多数の関節からなるヘビ型ロボットグリッパの「ソフトグリッパ」は、任意形状のものを柔らかく把持することを実現したものであるが、これはその後世界的に行われるようになった劣駆動アームに関する研究の先駆的研究と看做されている。そのほかにも、コイルスプリングの関節を複数のチューブワイヤで駆動する多関節アームの研究や、形状記憶合金を駆動系とする能動内視鏡の研究、根元から各関節をワイヤで駆動し、そのワイヤ張力を根本側関節に積極的に働かせる「干渉駆動」を利用することで関節の負荷荷重を上げるCT-Armの研究、平行4節リンクを積み上げる機構と、特殊なワイヤの張り方によって自重を機構的に補償することで多関節アームを実現するFloat Armの研究などを行っている。
これらのうち、Float Armの研究は、日産自動車との共同開発で多関節型バランサーとして実用化され、同社の製造コスト低減、品質の向上、エルゴノミクス性向上に貢献し、その業績で第1回カルロスゴーン賞を受賞している。また、これはその後CKD社にもライセンス提供され、同社でパワフルアームという名称で商品化されている。さらに、このアームは (株)ハイボットにおいてプラントの点検用多関節ロボットアームとして改良が重ねられ、現在同社の主力商品として販売されている。このテーマに関する主な受賞
- ① S. Hirose, Y. Umetani:The development of soft gripper for the versatile robot hand, Volume 13, Issue 3, 1978, Pages 351-359 Mechanism and Machine Theory 2017 Award for Excellence (Elsevier) the top 10 most cited papers since its first publication.
- ② Koji Ikuta, Masahiro Tsukamoto, Shigeo Hirose, Most Influential Paper Award from ICRA 1988 (IEEE Robotics and Automation Society) “Shape Memory Alloy Actuator System with Electric Resistance Feedback and Application for Active Endoscope” Proc. of ICRA vol1, no.3 pp.427-430 (1988) (24 May, 2018)
- ③ 広瀬茂男、馬書根:ワイヤ干渉駆動型多関節マニピュレータの開発, 計測自動制御学会論文集, 26, 11, pp.1291-1298 (1990) (計測自動制御学会 論文賞 1992.7.23)
ここで①の受賞は、昭和53年に印刷されたヘビ型ロボットグリッパに関する論文であるが、平成29年になって、これが学術誌Mechanism and Machine Theoryの創刊以降最も引用された10の論文の一つとして表彰されたものである。
また②の受賞は、昭和63年に印刷された形状記憶合金を用いたヘビ型能動内視鏡に関する論文に関してのものであるが、これも平成31年に開催された世界最大の学会であるIEEE(米国電気電子学会)主催のICRA(International Conference on Robotic and Automation)というロボット工学における中核的国際会議において、1988年以降のもっとも影響力の大きかった論文として受賞したものである。
-
Chapter 03
もっと見る
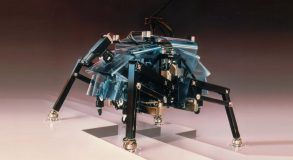
4足歩行ロボット -
同氏はヘビとヘビ型ロボットの開発研究の後には並行して、4足歩行ロボットの研究開発を開始し、エネルギ効率の良い脚の設計法であるGDA(Gravitational Decoupled Actuation)と呼ぶ設計原理を考案している。1981年にはアメリカ国防総省の新技術研究機関であるDARPAが行っていた6足歩行ロボットAdaptive suspension Vehicleの開発プロジェクトに参加するため2か月間オハイオ州立大学に招待され、同氏が提案したGDAの原理に基づく脚機構が実際に同ロボットに採用されている。なお、そのころの世界の多足歩行ロボットの動向は6足歩行ロボットに向いていたが、同氏は一貫して4足歩行ロボットの優位性を主張しており、以降の研究は4足歩行ロボットに収斂している。
その後、4足歩行ロボットの研究は、法面での土木作業を行う動く足場的な機能を発揮する全重量15トンのTITAN11号機の開発に発展した。残念ながらこの装置は、経済的な理由でまだ実用的には活用されていないが、いまだ工業的応用が実現していない多足歩行ロボットの実社会への実装の仕方を示す研究となっている。
また、1990年代には、4足歩行ロボットの歩き方(歩容)制御への研究需要が高まっていたにもかかわらず、実験に適した歩行ロボットが存在しなかった。このことが日本の歩行ロボット研究の進展を阻害していると考え、同氏は研究用プラットフォームとしての普及型4足歩行ロボットも開発し、協力企業(岡崎産業)に廉価で販売させている。このロボットはその後、日本中の研究室で導入されるようになった。
同氏が4足歩行ロボットの制御法に関して行った研究は、以下に紹介する①の論文にまとめられているが、これは、日本ロボット学会が創設以来の論文の中で最高の論文として第1回論文賞を授与している。また、平坦地では、歩行だけでなく車輪走行が出来る方が望ましいため、足裏を垂直に立てるとローラスケートのローラになるというローラーウォーカの研究や、歩行とクローラ移動も切り替えられる移動ロボットなども開発している。このテーマに関する主な受賞等
- ① 広瀬茂男、福田靖、菊池秀和:4足歩行機械の制御システム, 日本ロボット学会誌, 3, 4, pp.304-324 (1985) (日本ロボット学会 第1回論文賞 1987.11.27)
- ② 広瀬茂男、有川敬輔:研究プラットフォームとしての普及型歩行ロボットTITAN-VIIIの開発, 日本ロボット学会誌, 17, 8, pp.1191-1197 (1999) (日本ロボット学会 実用化技術賞 2000.9.13 受賞者は他に 福島 E. 文彦、 片桐正春(東京精機))
- ③ 遠藤玄、広瀬茂男:ローラーウォーカに関する研究-基本的運動の生成と自立推進実験-,日本ロボット学会誌,18,8,pp.1159-1165 (2000) (日本ロボット学会 論文賞 2002.10.13)
- ④ 落合亮吉,広瀬茂男:“脚・クローラ複合型不整地移動ロボットの研究”(3D3-4)、第6回計測自動制御学会システムインテグレーション部門講演会 (2005)
- ⑤ 高橋将史,米田完、広瀬茂男:脚車輪ハイブリッド4足ロボットによる不整地移動(1M1-2)、第6回計測自動制御学会システムインテグレーション部門講演会(2005) (ベストセッション賞 2005/12/18)
- ⑥ Ryuichi Hodoshima, Takahiro Doi, Yasushi Fukuda, Shigeo Hirose, Toshihito Okamoto, and Junichi Mori:The JRM Best Paper award, 第一回JRM優秀論文賞,Development of a Quadruped Walking Robot TITAN XI for Steep Slope Operation - Step Over Gait to Avoid Concrete Frames on Steep Slopes - Ryuichi Hodoshima, Takahiro Doi, Yasushi Fukuda, Shigeo Hirose, Toshihito Okamoto, and Junichi Mori, Journal of Robotics and Mechatronics, 19,1,pp.13-26,2007 (2009/5/01)
- ⑦ Gen Endo, Shigeo Hirose: Study of Roller Walker-Improvement of Locomotive Efficiency of Quadruped Robots by Passive Wheels, Advanced Robotics, Vol.26, No.8-9, 2012 2014 Best Paper Award (5th Sept. 2014)
-

Chapter 04
もっと見る
地雷探知除去ロボット -
同氏は、人間が作業できないような危険な場所での作業負担軽減に貢献することが重要であると考え、紛争地の市民を助けることを目的とした人道的なロボット開発をしている。1996年に日本では初めての地雷探知除去ロボットの研究を日本ロボット学会に発表し、アフガニスタンの復興支援のため科学技術振興機構(JST)が2002年に始めた「人道的見地からの対人地雷の探知・除去活動を支援するセンシング技術,アクセス・制御技術の研究開発」に参加し、カンボジア、クロアチア、アフガニスタンなどを視察し、Gryphonと呼ばれる実用的な地雷探知ロボットを開発している。技術的には、現場で最も信頼され活用されている金属探知機を利用して、探知能力を高めた新しい探知技術を開発しており、これについては以下の学会賞を受賞している。
また、この地雷探知ロボットの開発物語については、高校2年生の英語教科書CROWN(三省堂)にて「Before Another 20 Minutes Goes By」のタイトルで学習教材としても活用されている。なお、Gryphonはクロアチアで行った実験によって、地雷探知作業を行う人よりも正確に地雷探知が出来るという実験結果を得ている。
この研究は、共同研究者の福島エドワルド文彦東京工科大学教授が引き続き開発を進めており、2019年にはアフリカ・アンゴラの地雷探知除去作業で試験的に探知作業に活用されている。このテーマに関する主な受賞
- ① 成田哲也, 福島E.文彦,広瀬茂男:第20回インテリジェント・システム・シンポジウム(FAN Symposiom2010/iFAN 2010 in Tokyo, JAPAN) プレゼンテーション賞, Study of Discrimination Methods for Metal Fragments and Mines in Humanitarian Demining Tasks,The 2010 International Symposium on Intelligent Systems (iFAN 2010),Paper No. 542, Sep. 25-26,2010, Tokyo (2010/9/26)
-

Chapter 05
もっと見る
無限回転型ロボット -
同氏はヘビ型、そして多足歩行型のロボット開発を始めた後、より実用的な移動ロボットの形態を追求する過程で、車輪やローラなどの無限回転を行う装置による移動方式の検討を始めている。
そのうちの一つは、地形に適応できるクローラ走行車両であり、それに関しては以下に紹介する①⑤⑦の学術賞を受賞している。また、この研究ではトピー工業と新型の軽量クローラベルトとそれを用いたクローラ車両を開発したが、これはその後同社で商品化され、一部は福島第一の内部調査にも利用されている。他には、VUTONあるいはVmaxと呼ばれる「全方向移動車両」の開発にも発展させている。これについては、以下に紹介する②の受賞をしている。さらに、この全方向車両によって地震を体感できる「地震ザブトン」を白山工業(株)と開発している。これに関しては、次のChapter 06に詳述する。
また、惑星探査を行う無限回転車輪を用いた惑星探査ローバーの開発も行い、以下に紹介する③④⑥の受賞をしている。このテーマに関する主な受賞
- ① Shigeo Hirose, Sanehito Aoki, Jun Miyake:Terrain Adaptive Quadru-Track Vehicle HELIOS-II, Proc. 20th ISIR, Tokyo, pp.235-243 (1989) (日本産業用ロボット工業会 JIRA賞 1990.10.25)
- ② 広瀬茂男、天野信一 : 大荷重高効率全方向車両の開発, ロボティクス・メカトロニクス講演会’93予稿集, pp.350-355 (1993) (日本機械学会ロボティクスメカトロニクス部門 ROBOMEC賞 1994.6.30)
- ③ Shigeo Hirose, Naritoshi Ootsukasa, Takaya Shirasu, Hiroyuki Kuwahara, and Kan Yoneda:Fundamental Considerations for the Design of a Planetary Rover, Proc. ICRA, Nagoya, pp.1939-1944 (1995) (IEEE Robotics and Automation Society 1995 Best Conference Paper Award 1995.5.26)
- ④ 広瀬茂男、桑原裕之 : 東京工業大学における月・惑星ローバーの設計, 設計工学, 33, 12, pp. 449-454 (1998)(日本設計工学会 The Most Interesting Reading賞 1999.5.22)
- ⑤ 広瀬茂男、三宅潤、青木実仁:対地適応形クローラ走行車、特許番号2717722、特許登録日平9.11.14 (財団法人 手島工業教育資金団 手島記念発明賞 2001.3.19)
- ⑥ Atsushi Kawakami, Kazuhiro Motomura, and Shigeo Hirose: SMC Rover: Planetary Rover with Transformable Wheels, ICRA 2003 Taipei (Finalist for Best Video Award 2003.9.17)
- ⑦ 上田紘司, Michele GUARNIERI, 程島竜一, 福島E. 文彦, 広瀬茂男:アーム搭載クローラロボットHELIOS IXの研究-センサを用いた環境適応動作-) 2010年度計測自動制御学会学術奨励賞 技術奨励賞 (2011/2/22)
- ⑧ 広瀬茂男、Paulo Debenest: 発明の名称、自走式架空電線点検装置、手島精一記念研究賞(発明賞) Tejima Research Award 東京工業大学長 伊賀健一 (2012/02/27)
- ⑨ 広瀬茂男:発明奨励賞、自走式可搬型地震動シミュレータ 特許2604112、公益社団法人 発明協会、ホテルアソシア静岡 (2012.11.27)
-
Chapter 06
もっと見る
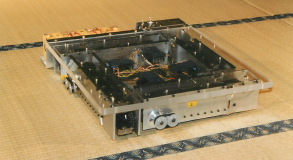
地震防災への展開 -
同氏は無限回転型ロボットVUTONの原理を生かし、任意の地震動を体験できる全方向車両「地震ザブトン」を白山工業と共同で開発している。
これまでの地震体験と言えば、大掛かりな起震車を用意しなければならず、雨天時の運用が困難であることや可動幅の制限があるため横に大きく揺さぶるような地震を体験することができないなどの課題があったが、地震ザブトンの開発により、天候に左右されない室内で、実際の地震と同じような振幅の大きい横揺れを忠実に再現することができるようになった。地震発生時の様子をスクリーンやVRで同時に体験することができ、揺れと被害の関係性を学ぶことができるとして、地域での防災啓発活動に活かされている。これまでに3万人以上が体験し、新たな防災啓発ツールとしてテレビの報道番組などで多く取り上げられている。このテーマに関する主な受賞等
- ① 吉田稔,広瀬茂男:全方向移動車両機構を利用した従来にない地震体験装置,日本機械学会誌,Vol. 114,No. 1111,pp. 448-449,2011.
- ② Roh, S., Taguchi, Y., Nishida, Y., Yamaguchi, R., Fukuda, Y., Kuroda, S. and Hirose,S. Development of the Portable Ground Motion Simulator of an Earthquake, Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5339-5344, 2013.
- ③ Matsuura, D., Ishida, S., Akramin, M., Kucuktabak, E.B., Sugahara, Y., Tanaka, S., Fukuwa, N., Yoshida, M., Takeda, Y.,: Conceptual Design of a Cable Driven Parallel Mechanism for Planar Earthquake Simulation, The 21st CISM-IFToMM Symposiumu on Robot Design, Dynamics and Control(ROMANSY2016), Springer, pp.403-411, 2016.
- ④ 広瀬茂男:発明奨励賞、自走式可搬型地震動シミュレータ 特許2604112、 公益社団法人 発明協会、 ホテルアソシア静岡 (2012.11.27)
- ⑤ 2013年 日本地域安全学会「技術賞」
- ⑥ ジャパン・レジリエンス・アワード2016「優秀賞」
これまでの主なメディア出演
- 2009/8/26 テレビ東京 「ワールドビジネスサテライト」
- 2010/3/7 NHK総合 「NHKスペシャル-MEGAQUAKE-」
- 2010/3/14 日本テレビ 「NEWSZERO」
- 2010/7/10 日本テレビ 「世界一受けたい授業」
- 2012/1/6 NHK総合 「東京消防庁出初め式」
- 2013/8/31 NHK Eテレ 「学ぼうBOSAI」
- 2013/9/17 NHK Eテレ 「オイコノミア」
- 2015/1/6 NHK総合 「東京消防庁出初め式」
- 2016/8/27 TBS 「報道特集」
- 2017/4/7 スペイン国営放送 「Audiencia Abierta」
- 2017/5/8 インドNDTV 「NDTV PRIME」
- 2017/9/4 NHK 「NHKスペシャル-MEGACRISIS-」
- 2018/3/13 テレビ東京 「ワールドビジネスサテライト」
- 2018/10/3 NHK 「探検バクモン」
- 2019/1/5 NHK WORLD 「BOSAI -地震編-」(英語版)アジア全域
- 2019/2/7 NHK WORLD 「BOSAI -地震編-」(日本語版)
- 2019/2/28 ディスカバリーチャンネル「TOMMOROW by JAPAN」(英語版)アジア全域
- 2020/2/29 テレビ東京 「出没!アド街ック天国(分倍河原編)」
- 2021/5/9 NHK 「明日をまもるナビ #5」
- 2021/5/16 NHK 「明日をまもるナビ #6」
-
Chapter 07
もっと見る
新ロボット要素研究 -
新たなロボット開発は、既存の要素の組み合わせだけでは実現できない。そのため、同氏は数々の新しい機械要素やセンサを課題や目的に合わせて新開発している。
それらは、新たなステレオビジョン用視覚センサ(以下に紹介する①の注目発明)、壁面移動ロボットのための磁気吸着ユニット(以下に紹介する②の注目発明)、光学式の6軸力センサ(2009年にミネベア社により商品化)、負荷に感応して等価的にピッチを変えられるネジ機構(以下に紹介する③④の受賞)、人命救助に使う事の出来る自動車用ジャッキ(以下に紹介する⑤の受賞)、レスキュー用の空圧で瓦礫内に伸展するアーム(以下に紹介する⑥の受賞)、回転型負荷感応無段変速機(以下に紹介する⑦の受賞)、人命救助用のいくつかのロボット機器(以下に紹介するの⑧の受賞)、円盤状の物体を効率よくハンドリングできる把持機構(以下に紹介する⑨の受賞)、ビルの窓拭き用ロボットのための移動機構(以下に紹介する⑩の受賞)、水中移動用ロボットの推進機構(以下に紹介する⑪の受賞)などがある。このテーマに関する主な受賞
- ① 広瀬茂男:注目発明の選定 1990.4.19(二眼レンジファインダ装置の信号処理法 出願公開番号特開昭63-26522)
- ② 広瀬茂男:注目発明の選定 1993.4.12(磁気吸着式壁面移動装置 出願公開番号特開平2-151584)
- ③ 広瀬茂男、米田完:光学式6軸力センサとその非線形校正, 日本ロボット学会誌, 8, 5, pp.523-532 (1990) (財団法人高度自動化技術振興財団 高度自動化技術振興賞(本賞) 1994.3.4)
- ④ Shigeo Hirose, Craig Tibbetts, and Tetsuo Hagiwara:Development of X-Screw: A Load-Sensitive Actuator Incorporating a Variable Transmission, Proc. ICRA, Detroit, pp.193-199 (1999) (財団法人ファナックFAロボット財団 FAロボット技術振興賞(本賞) 2000.3.10)
- ⑤ 広瀬茂男:グッドデザイン賞 2002.10.30(災害救助用ジャッキ「ガレキング」 日常生活で活用しながら災害時に人命救助に流用できる機器)
- ⑥ 三島大輔、青木岳史、広瀬茂男:狭隘環境内探索用空圧伸展アームの開発、計測自動制御学会SI2002(神戸)講演論文集、pp.49-50 (2002)(SI2002ベストセッション賞 2002.12.21)
- ⑦ 萩原哲夫、広瀬茂男:回転型負荷感応無段変速機の開発、その2 効率の向上、ロボティクス・メカトロニクス講演会'02講演論文集、2P2-H10 (1)-(2) (2002)(日本機械学会 ロボティクス・メカトロニクス部門 ROBOMEC賞 2003.5.24)
- ⑧ 広瀬茂男:特別賞、瓦礫内探査と人命救助作業のための高性能資材群、消防庁長官 荒木慶司(2008/06/27)
- ⑨ 遠藤玄, 広瀬茂男, 山田浩也:SI2009優秀講演賞 円筒回転指先を持つ円盤状物体ハンドリンググリッパの開発、SICE SI部門講演会(SI2009),東京、pp.835-837, 2009 (平成22年5月17日)SI2009優秀講演賞
- ⑩ 今岡紀章、広瀬茂男:窓枠を乗り越えられる窓全面清掃型ロボットの機構に関する基礎的研究、SICE SI部門講演会(SI2009)、pp.1839-1842、2009(平成22年5月17日)SI2009優秀講演賞
- ⑪ Huang, Ya-Wen, Shigeo Hirose: Development of Tether Mooring Type Underwater Robots: Anchor Diver I and II, Best Paper Award, USYS'10(International Conference on Underwater System Technology 2010, Cyberjaya, Malaysia (2010/11/01)
-
Chapter 08
もっと見る
新設計原理 -
同氏は、東工大時代に総計150台にのぼるロボット開発を行ったが、その過程でロボット設計のいくつかの基本原理の提案を行っている。ロボットの設計論に関しては、これまでにもあったが、いずれも抽象的で実際の設計に役立つものではなかった。同氏の設計原理は、実際の設計過程で編み出したもので著しく実用性が高く、現在も諸学会の講演会でその原理が紹介されている。それらの代表的なものは、負エネルギ消費防止の原理、連結差動機構、そして干渉駆動の原理などである。以下にその内容を述べる。
ロボット設計の基本原理の提案
① 負エネルギ消費防止の原理
これは、そもそもは歩行ロボットの脚のエネルギ効率を向上するために提案したGDA(Gravitationally Decoupled Actuation)の考察から生まれたものである。多くの運動系は、負のエネルギ消費、つまり、外部にエネルギが熱として散逸されているのを放置しているために効率が悪くなっているが、それを防止する機構や制御法によって機械システムの効率向上を図ろうとするのが、その設計法である。これによって、たとえば、永久磁石をゼロの力で剥がすことができるIBマグネットの開発や、Float Armと呼んでいる多関節アームなどを実現している。② 連結差動機構
差動機構とは3つのエネルギーポートを有する機構であるが、その1つのポートを連続的に接続すると、エネルギ消費無しに複数のポートにエネルギを分散できることを指摘し、差動機構としては多くの構造が考えられるため、疑似的な多自由度機構がこれによって構成できることを明らかにしている。ソフトグリッパはその一つの典型例であるが、それ以外に、多くの設計例があり得ることを明らかにし具体的なロボット開発に活用している。③ 干渉駆動の原理
干渉駆動とは、ある関節を駆動するためのワイヤを根本側の節に設置したプーリに巻架しながら基台部の駆動系に伝達するという機構を用いて、先端節駆動用のワイヤ張力を根本側の節に積極的に干渉させることで、効率的に関節駆動力を根本側の節に生成しようとするものである。同氏は、このような構造は人体の指関節の駆動系などにも使用されていることから、生体駆動系駆動原理の優秀さも指摘している。この干渉駆動の原理を応用すれば、例えば全長15m以上の伸縮自在な片持ちアームの先端を動かし、10㎏の錘を吊るすといったことも可能になる。そして、この駆動原理はワイヤ駆動系以外にも多様な分野で適用可能なことを示し、雷電と呼ぶロボットアームでは作動機構との組み合わせで干渉駆動の効果を発揮して高い可搬重量性を生み出したり、姿勢可変型クローラで搭載アクチュエータの有効利用を実現したりして、その有効性を明らかにしてきている。
-

Chapter 09
もっと見る
創造性教育 -
同氏は、東工大時代に機械物理学科(現:機械宇宙学科)の設計製図の学部3年生の講義を担当したが、それまでの既存の機器をただ設計してみるだけでは本来の設計にはならないとして、創造性を養うための「機械創造」という講義を立ち上げた。
その内容は、学生たちに大道芸をする計算機制御ロボットを制作させるものであり、観客(同学科の2年生)を相手に作り上げた計算機制御のロボットに芸をさせ、観客を喜ばせた度合いで成績を決めるというものであった。これはその後、1997年の日本機械学会の100周年記念に同氏が委員長として創設したロボット競技会である「ロボットグランプリ」の中の主要競技としても採用され、現在では全国規模で開催されるようになっている。
そして、当時このようなモノ作り教育を実施するには東工大内に十分なスペースと機器が無かったため、同氏は学科の協力を仰いで募金活動を実施し、約1億円の資金を集めて「創造工房」という教育スペースを創設している。この施設は、東工大機械系の共有施設として現在でも大いに活用されている。
また同氏は、エンジアリングセンスを磨くには大学に入ってからの教育では遅すぎると考え、一般大衆向けに「先端ロボット世界」という講演とロボットのデモ大会を毎年実施している。また(社)発明協会の少年少女チャレンジコンテストの委員長として全国の発明クラブを巻き込んだ創造性育成教育にも尽力している。
-

Chapter 10
もっと見る
未来ロボット社会への提言 -
日本ではこれまで、人間型ロボット(ヒューマノイド)の研究がマスコミ等から注目されているが、同氏が研究するロボットはそのようなSF的なロボットではない。同氏はSF的な未来予測における誤解や、アシモフのロボット3原則に代表される擬人的なロボット倫理学の問題点を指摘し、ロボットの本質的な特性を生かして人々の生活に真に役に立つロボット開発の指針とロボット倫理の構成法に関して提言し続けている。これらの活動に関しては以下の2つの論説に学会から賞を受けている。
このテーマに関する主な受賞
- ① 広瀬茂男:ロボットの新行動規範, ロボット(日本ロボット工業会編), 89, pp.99-105 (1992)(日本産業用ロボット工業会 20周年記念論文 最優秀賞 1992.10.16)
- ② 広瀬茂男 : 理想的ロボット化社会への道, 日本ロボット学会誌, 12, 3, pp. 345-351 (1994) (日本ロボット学会 創立10周年記念論文優秀賞 1993.11.12 本論文は入賞後学会誌に掲載された)
不織布マスク内の空気を整流し、息苦しさを軽減するマスク補助器具HEROインナーマスク
詳しく見る世界を驚かす独創的なロボット開発をしたい人は集まれ!
極限環境ロボット研究所
採用ページ研究開発
HAKUSANが大切にしている価値観「おもしろいモノをつくろう」。
この原点となる研究開発の取り組みについてご紹介します。